
Last week I had the rare opportunity to get an inside tour of the various student-led “vehicle” projects being built in NUS Engineering this year.
I’m building a virtual world as an artwork at the moment, and when I was talking about how one would navigate that world, it was suggested to me that we could even potentially incorporate some of the current student vehicle projects as actual vehicles inside the world too. I was really surprised to be able to get a close-up view of all these machines and the chance to speak with the students directly about their projects.
NUS Formula SAE
I had always seen these Formula 1 cars around Engineering but I never knew the story behind them. For the last 22 years, every year there will be a group of Engineering students who come together and spend a year of their time producing a car for the SAE competition, which is an international competition where undergraduate and graduate students “conceive, design, fabricate, develop, and compete with small, formula-style vehicles”.
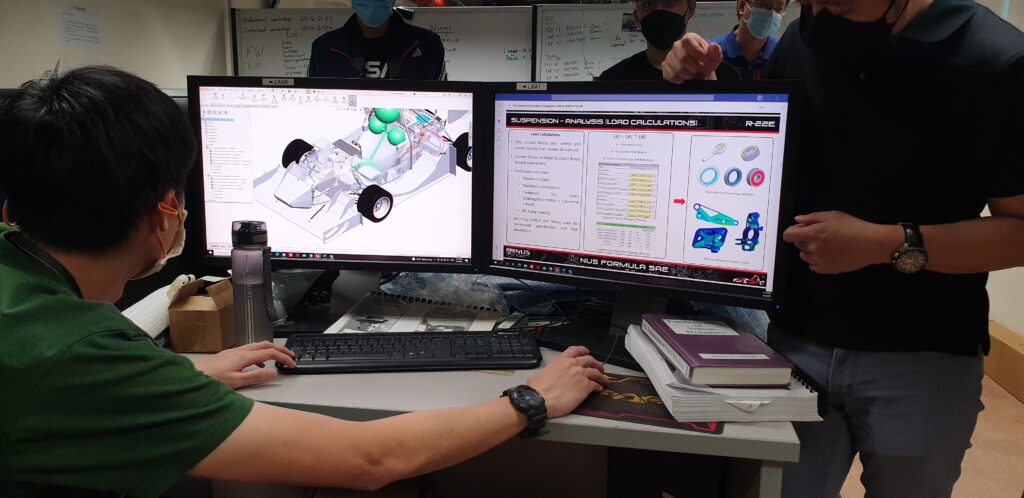
Hidden away in a couple of workshops and labs (which tap on NUS’s High Performance Computing systems), the students work on designing every single part of the vehicle as well as running simulations and analysis on the parts. Later on, to ensure that the simulations are accurate, they also use sensors to measure the performance of the parts in the vehicle itself, so that they know the validity of their simulations.

The software they use for prototyping is Solidworks, but they also render out beautiful videos which visualise a breakdown of the parts assembly, or the “exploded” view of the parts of the vehicle.
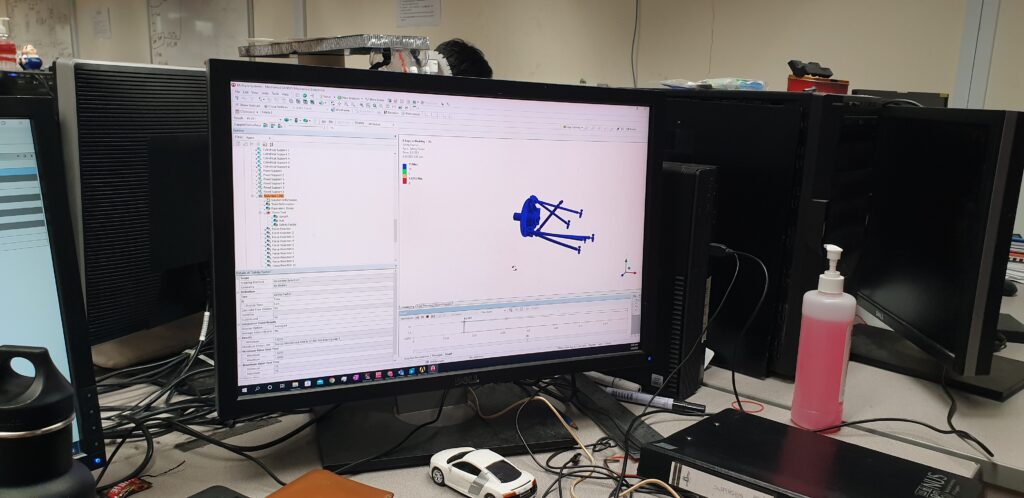
So much attention is paid to every detail, every single part, and every material used. They have to think about the supply chains of materials, availability of fabricators and timelines, and also test out the materials themselves. Here they are using an analysis software which can analyse their parts using finite element analysis (FEA), which means they can analyse things such as the structural, thermal, acoustic properties of the parts.
For example, they use this ANSYS software can use it to simulate how the materials will react under stress or deformation, how different parts would interact together, and how they might optimise the structural design. The software might even produce an optimised design which could potentially perform as well than the original human designed part but it might look very strange to the human eye and it might also cost more to produce.

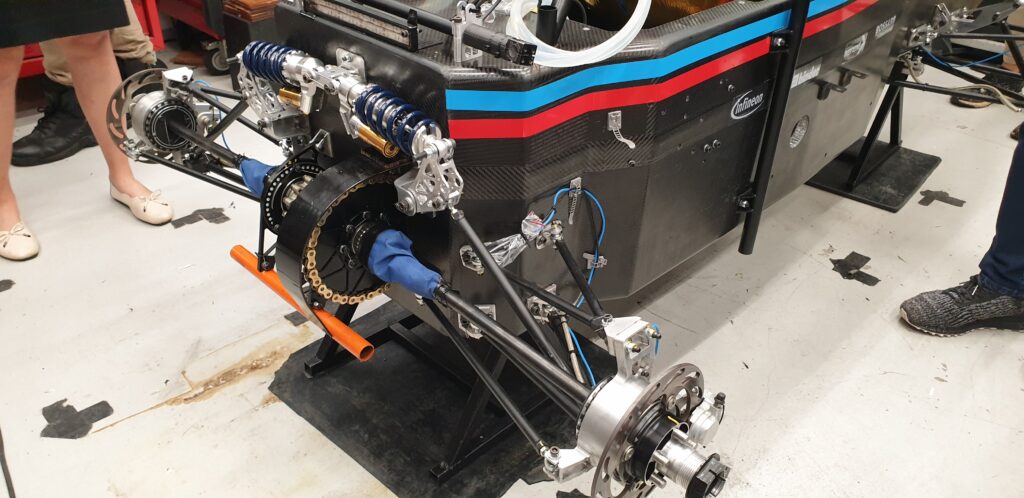
This above is the carbon fibre material used for the body of the car which has been previously put through a stress test, hence the little divot you see in the middle of it.

The students are divided up into teams tackling different portions of the design and engineering challenge of building the formula-style vehicle, which then includes the teams that build the Chassis (each of the following is a team: chassis, suspension, brakes/tyres/steering, aerodynamics, and driver controls), teams which work on Vehicle dynamics and simulations (vehicle modelling, driver training and simulations), and teams working on the Powertrain (electronics and electrical, accumulator, cooling system, and tractive system). This year they have 26 students, some from Year 4 and some from Year 3, with a mixture of mechanical and electrical engineering students.

This year their vehicle is an electric vehicle so it is supposed to look quite different since it is no longer powered by combustion. The thing that was impressed upon me is that every single tiny part you see here had to be justified for it to be a part of the car design and everything was important to its function. After the parts were fabricated, all of the assembly was done by the students who then got to make their mark in different parts of the vehicle. A student also drives it for the competition!
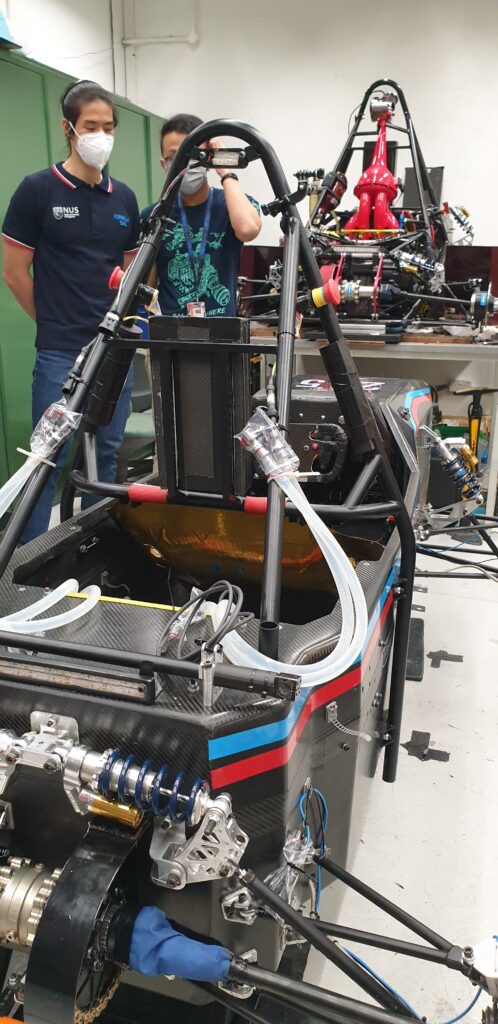
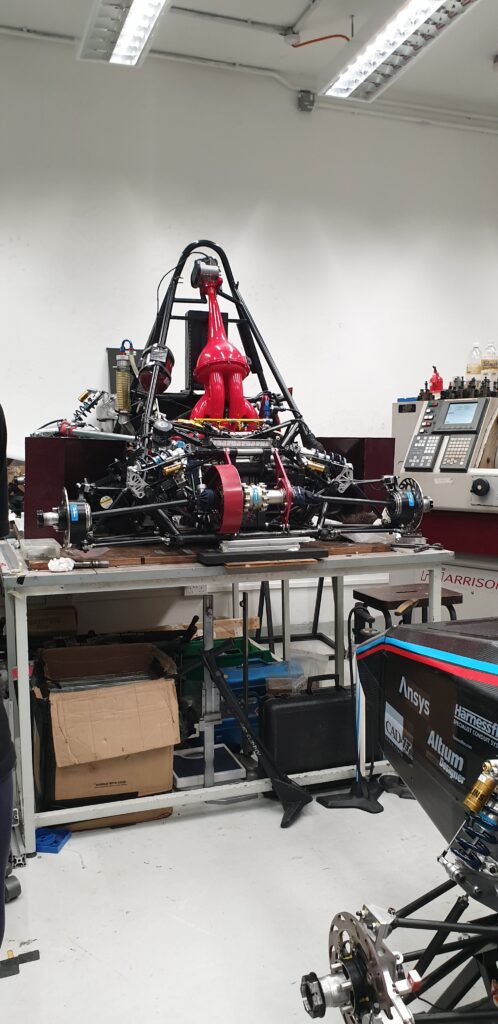
What you see here in the background (the red part) is last year’s car from 2021.
Robomaster Team LumiNUS
Nestled away in a standalone building that has its own little “warehouse arena” is Team LumiNUS which is quietly building a small fleet of land and air robots to battle it out in a robo “deathmatch”! (Deathmatch is the word used by DJI on their website)
To be absolutely frank this is what I imagined at first…
I don’t know about you but I definitely watched a fair bit of Robot Wars in the past on the telly and at first I thought it would be something involving fire and smashing and something almost medieval like BBC’s Robot Wars. But, it turns out that the DJI RoboMaster University Championships are a lot more… er…. civilised? Orderly?
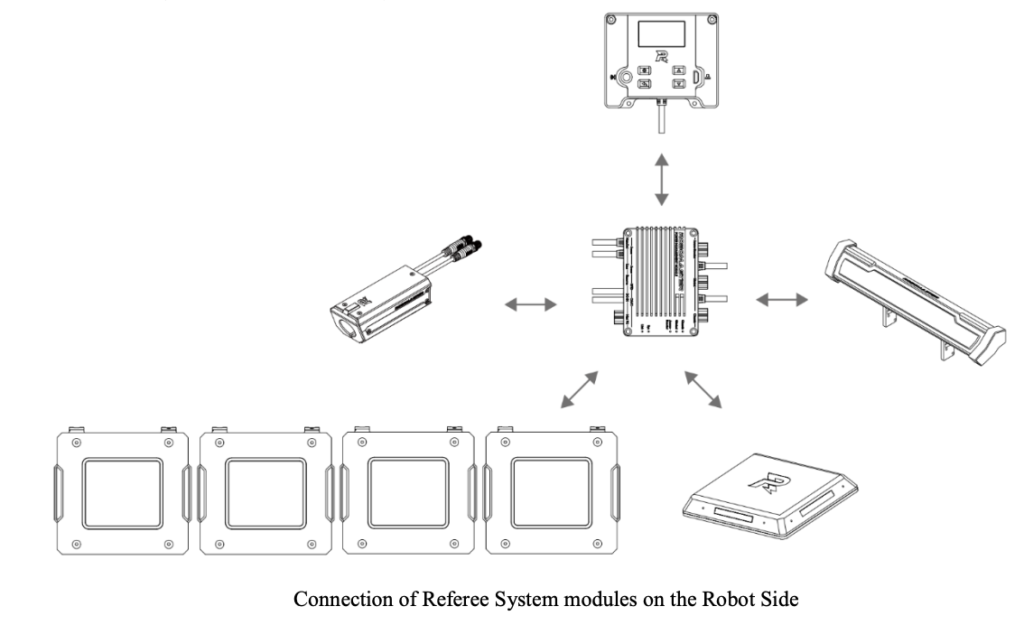
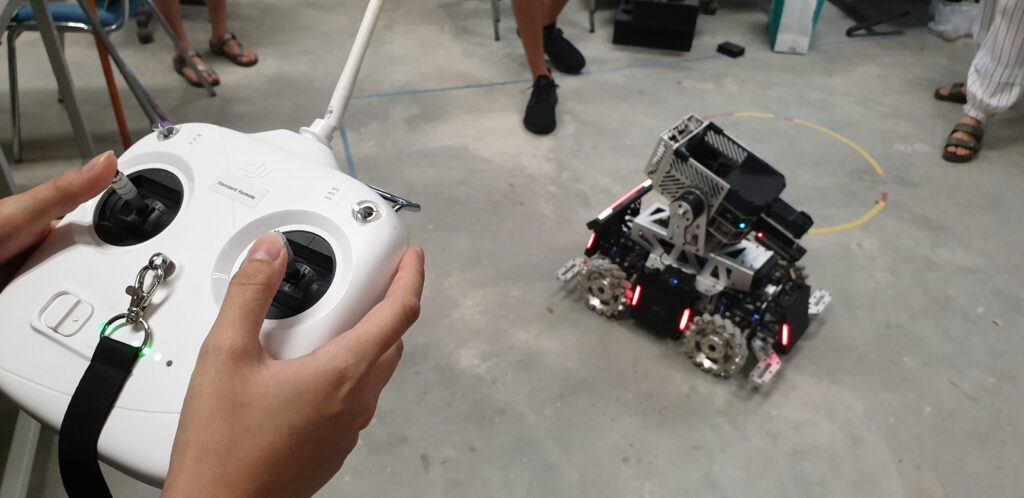
They are tactical games involving these neat little referee system plates and even a indicator health bar that is attached to the machine. There is no mechnical bloodbath, no fire and oil and broken bolts smeared across the battle floor. Instead, DJI has devised these “competition” parts which all competitors must purchase and attach to their bots. (Sidenote: wow that’s deviously ingenious of DJI! So, you’re telling me they created a new product line which are these referee system modules, for sale?)
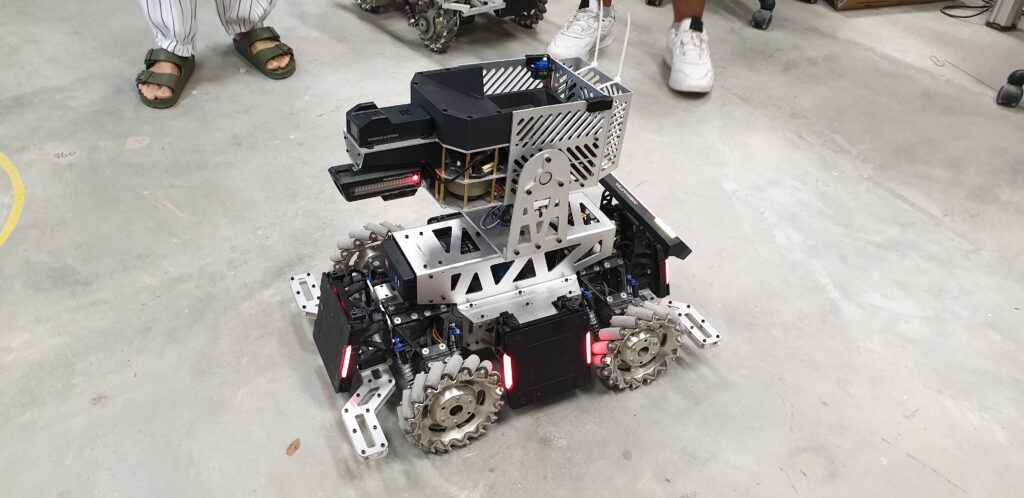
They make use of these mecanum wheels which can basically go in all directions. I’ve not seen these omnidirectional wheels before but looking at its design it allows for motion AND rotation in any direction in one go, depending on which of the four wheels it simultaneously activates and how much it activates.
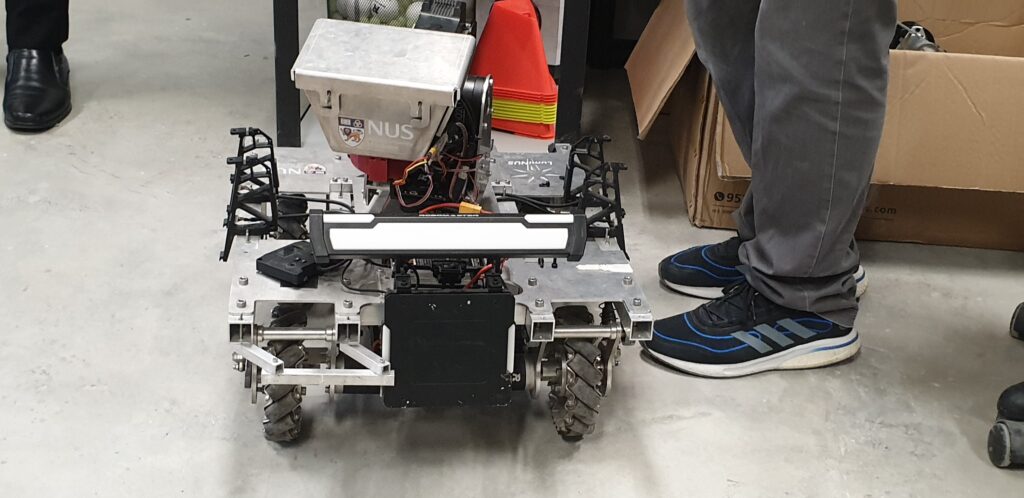
This is last year’s bot still standing. They are planning on building a fleet of 9 bots, but besides the challenges of building it, they also have to think of how the knowledge is independently passed on to different batches of students!

Besides the land bots they also have several aerial bots in the making. It may look like a big jumble of parts here in the picture, but the bots are also stronger than you think, they showed us a broken wooden target box which was one of the arena targets they were testing with.

So er…. it is great that they have this hidden and completely covered up space where they can build a simple wooden arena for their robots to practice!
Mars Rover

Hidden away inside E2A is a small workroom where a Mars Rover project. The University Rover Challenge (URC) is a project of The Mars Society, an international non-profit humans to Mars organization.
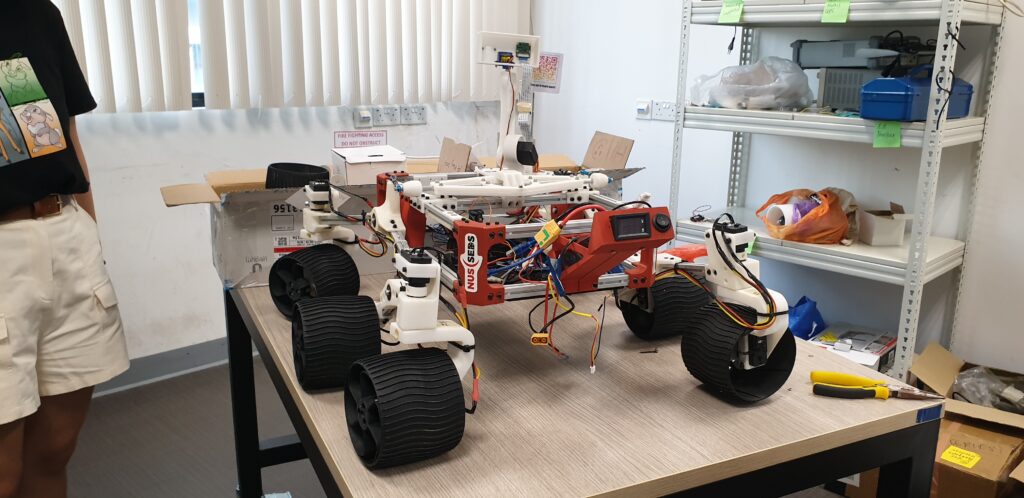
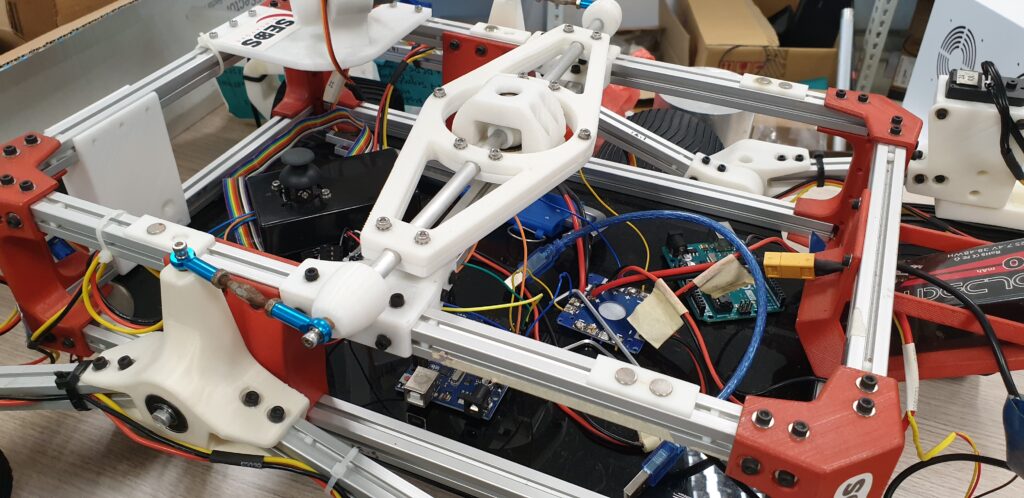
I was surprised that I recognised most of the parts here in this project. I’m an electronic hobbyist with no engineering background, but I have used this particular size of alumnium profile with the m3 screws for projects and there were many prototyping parts in the mix that I recognised and I suppose as an educated hobbyist I could almost imagine how I could reverse engineer it.
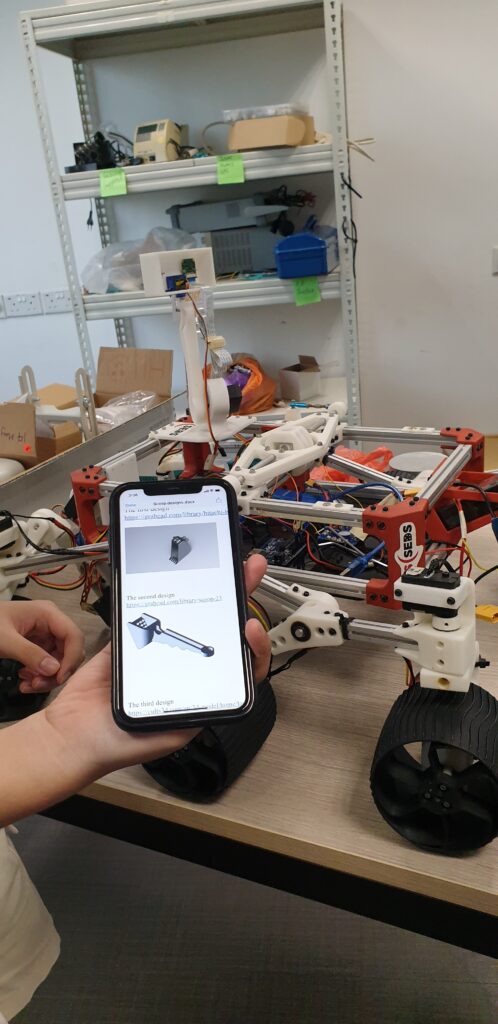
This particular robot scoops soil. Well. I have been known to scoop and collect soil, so I am sure me and this robot would get along tremendously.
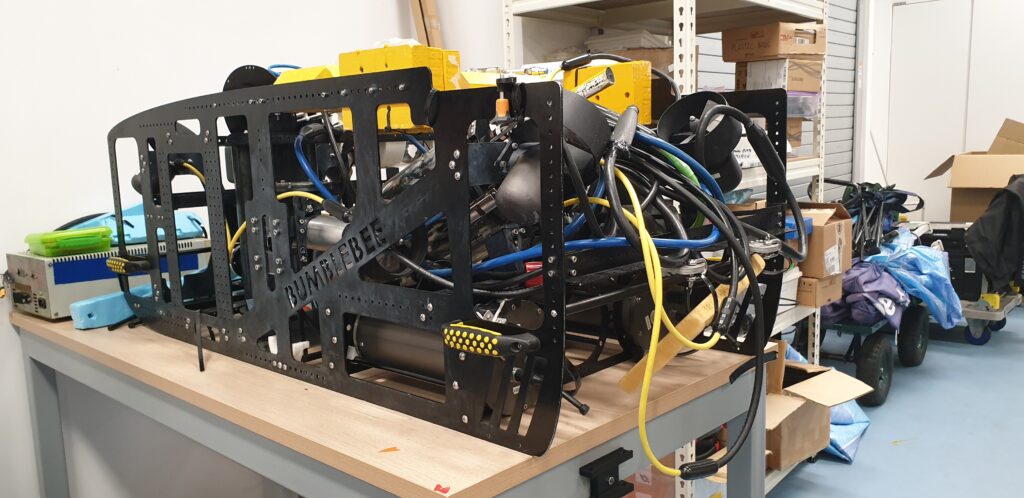
Team Bumblebee
This next set of competition robots involve maritime robots. Besides involving the mechanical and electrical engineering students, these robots are supposed to be completely autonomous, so they also have a team of computer science students. I honestly did not expect the AUVs to be so huge. I was blown away by scale of the competition and the ambitions of the team.
I began asking a question about where the team sit whilst they controlled this huge vehicle out at sea – but of course answer was that the entire robot was autonomous and expected to complete it on its own. There is no need for the students to control it. Unlike the other robots above, these robots are autonomous.

What you’re seeing here is an autonomous maritime robot with a roof where a drone would be released to autonomously complete a set of complicated tasks.

This AUV won the RobotX Challenge in 2018. On Robotx’s website, they write “The most complex robotic competition to-date. Until someone makes it even more complex.” Naturally, I went to find out what are the complex requirements for these robots. Here are some of the trials:
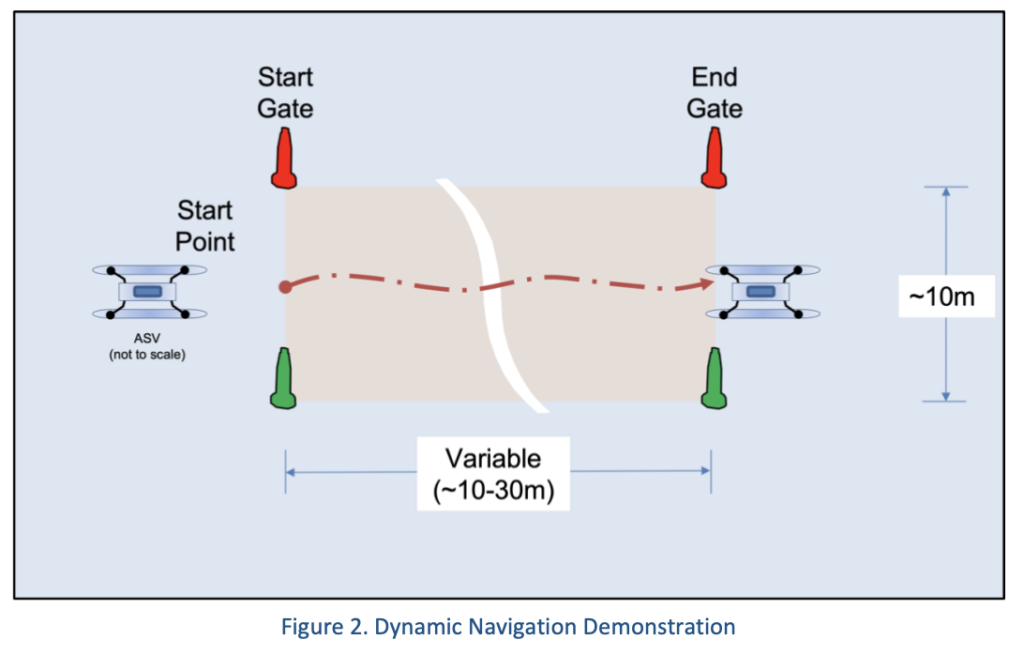
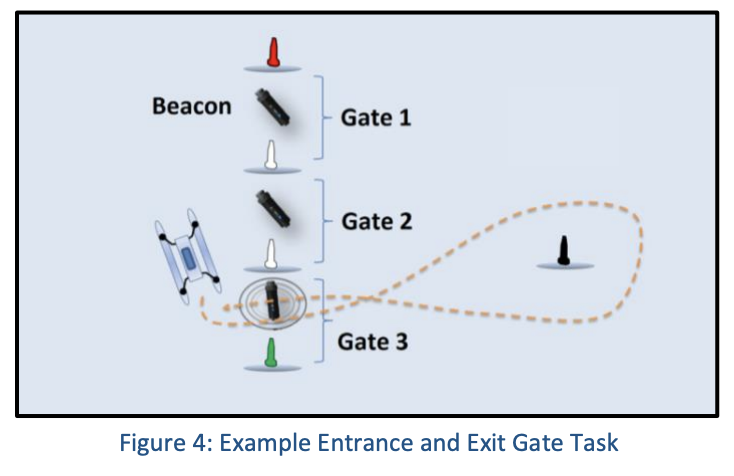
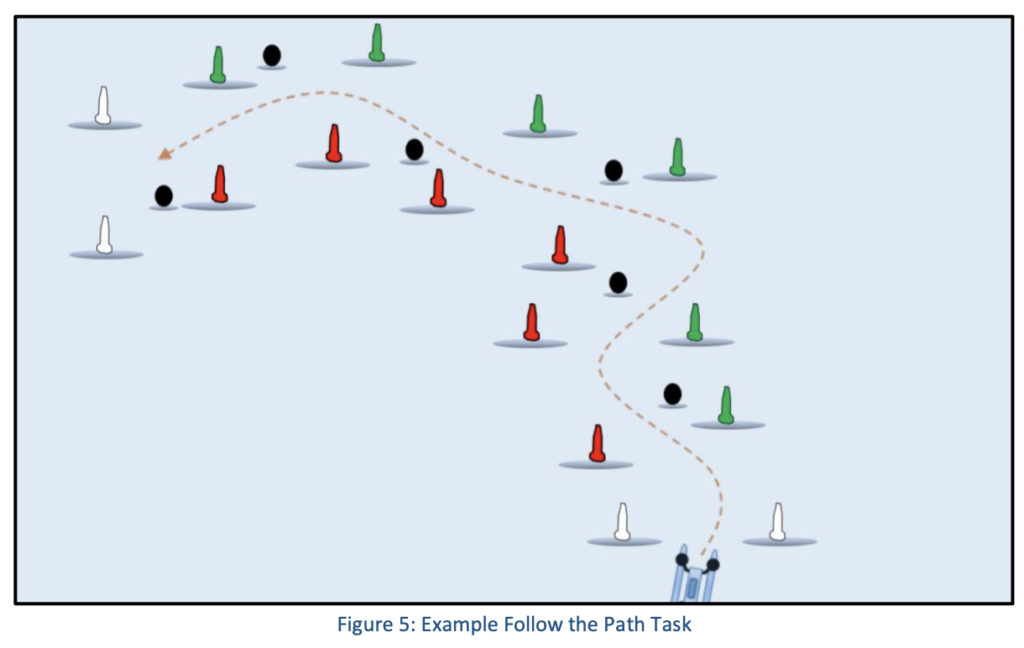
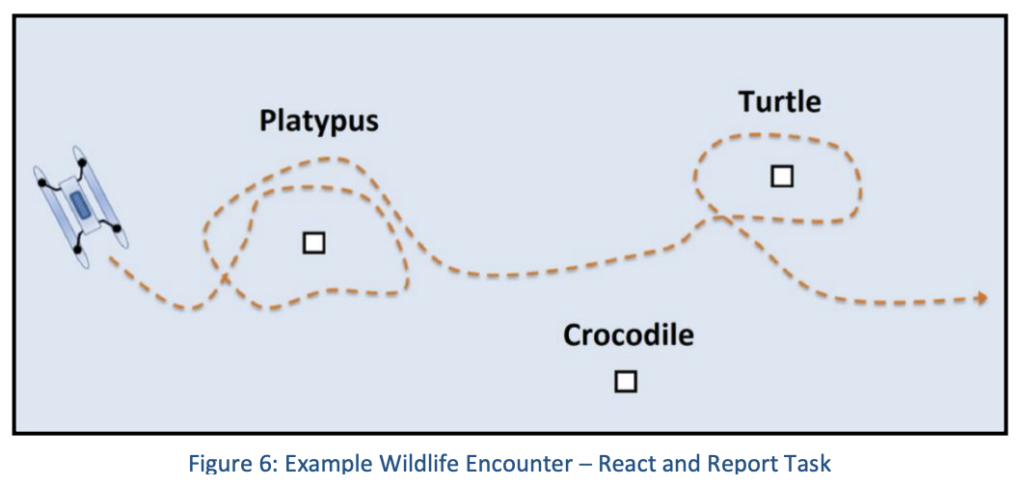
I went to look up the tasks for the AUV and in addition to maritime navigation, it even requires being able to detect a platypus, a turtle and a crocodile! Yep. This is very complicated… I mean, would I recognise a platypus in the sea? What does a platypus in the sea look like??? As in my previous post, you will know I have spent nearly no time on the water (Artist who makes artworks about Singapore River finally takes boat ride on Singapore River) and have never seen a platypus in real life in years…
(Just recently I was getting some units of the Oak-D-Lite computer vision cameras and thinking to myself that I should get them all fixed focus lenses because in my limited hobby project level/experience I couldn’t possibly think up of any scenario in which I might want to use these cameras on a drone with vibrations. Well. I guess here are several use cases right here. WHAT IF I DID WANT TO IDENTIFY A PLATYPUS, TURTLE AND CROCODILE IN THE SEA WITH MY DRONE?)



In the middle of our visit, this year’s AUV came back from Queenstown Swimming Pool, where it has been doing almost daily tests for them to improve it.
My thoughts on the tour
The above projects are actually more like extracurricular activities (CCAs) which are very intensive, and not necessarily part of their academic load, although some students map it over to their FYP (Final Year Project). Having managed some student projects in the past that involved voluntary but extremely heavy time commitments, this is an extremely difficult balancing act but often has the potential to be an amazing educational experience for the students – although it must be really hard to juggle. And for there to be so many different robotic challenge opportunities on campus in NUS Engineering!
I also see a lot of similarities in how engineers work and how designers work, because we both have prototyping and design and testing phases. So there is method and modularity to a project. We might be using the same 3D design software as well, but there are all these other parts of the software which I’ve always personally felt that as designer I do not have to concern myself with, as my role as designer ends at the considerations of aesthetic and user function. Here of course, it was interesting to finally get an insight into the complex stress and deformation modelling portions are something that the engineers are concerned with. And often to build a thing in the real world, we also the need the engineer’s knowledge to bring projects to reality.
One of the students from the RoboMaster team was telling us about how the mark of every student could be seen imprinted on the project through the tiniest of details on the bots, for example the decision to place a bolt at one place and deciding to put it in at that angle, and how it would affect other parts how this robot would then be designed.
Another observation I had was that some of the teams here have very few female engineers! Why is that so? Is it because of the nature of some of the projects being about Formula 1 cars or being closer to military AUVs? Personally I feel like in the HCI/UX design world where design and coding intersect, we still have quite a fair balance of genders in the classroom as well as the workplace, but it seems as the role goes more and more into engineering and tech then there is a visible fall-off. How do we level the career playing field in this area for the genders?
Oh and another funny thing is that engineers don’t really seem to be bothered about giving their robot a name. “We’re not very good at coming up with creative names,” one of them shyly said.
I think if you had a robot in a humanities department, I think everyone would be fighting for months to find the perfect name for it, probably the production of the entire robot would even have to halt until everyone could debate and find the perfect name for it (*actual thing that I experienced once when coming up with a name for a student publication…). Or if this were to be in a UX department, we’d be writing a complete user persona and user journey for the robot, giving it a fictional name and backstory and a whole list of its personality traits (*actual thing that my students have done when designing chatbots…)
Related posts:
 A Tour of PIXEL
A Tour of PIXEL
 A Tour of London’s Historical Wetherspoons
A Tour of London’s Historical Wetherspoons
 Paris Museum Tour de Force
The University, in jeopardy
Paris Museum Tour de Force
The University, in jeopardy
 Tilemill – Conditional Label Placement, Pseudo 3D Building Effects, and Polygon Patterns
RCA’s Department of Environmental Media, 1974-1986
Tilemill – Conditional Label Placement, Pseudo 3D Building Effects, and Polygon Patterns
RCA’s Department of Environmental Media, 1974-1986
 Traversing XML structures – Loops
Traversing XML structures – Loops
 Building a simple two servo walker
Building a simple two servo walker